I. Drop rigidity induced by Janus particle motion
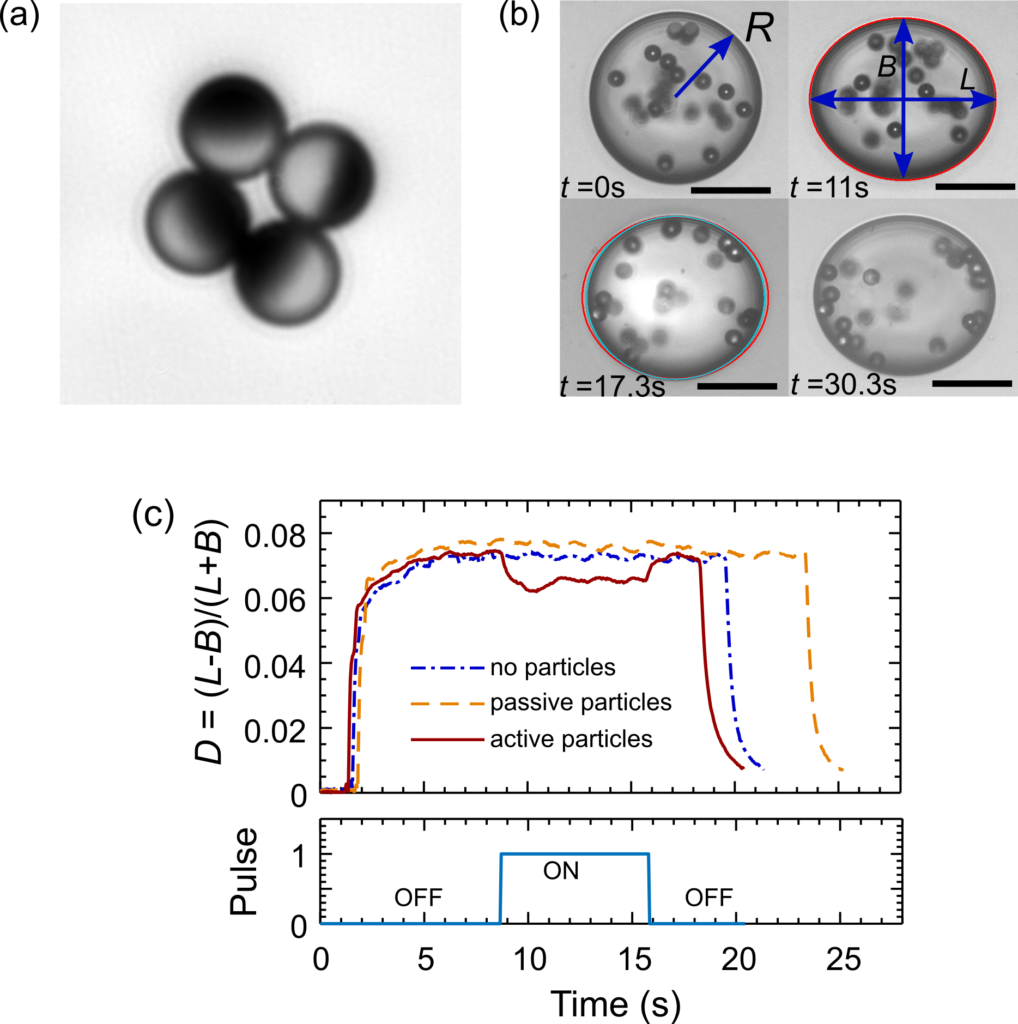
Figure: Active particle interaction with deformable interfaces. (a) Janus particles with a titanium coating on the half side of the particles. (b) Active Janus particles inducing a drop deformation reduction, resulting in a higher effective surface tension of the drop. Laser is on at 17.3s where particles move towards the interface quickly. (c) The drop deformations under laser illumination off or on. The Taylor parameter D is decreased when the laser is on, which means the drop deforms less.
The pressure of an ensemble of active particles is a fundamental but much debated property. Whether an equation of state relating pressure to number density exists for the different families of active particles, how this pressure depends on particle-particle interactions and on particle interactions with surrounding walls, or what is the role of geometry and wall curvature are typical questions. Establishing the dependence of the mechanical pressure of active systems on system parameters permits the exploration of different perspectives in active matter, notably self-assembly, phase separation, and encapsulation.
When encapsulated inside a droplet, the Janus particles are randomly distributed. However, under light illumination, they move but preferably towards the boundary of the droplet (see the Figure). Consequently, the drop deformation becomes less. This is in principle because of increasing the effective surface tension by the activity.
In this work, we have measured the mechanical resistance engendered by an assembly of active spherical and noninteracting particles to the deformation of a drop in which they are encapsulated. From a systematic study over an extended range of its dependence on active particle number density and particle velocity, as well as fluid and particle properties, it turns out that the measured mechanical resistance or pressure can be described by an expression for the pressure of an assembly of active particles proposed some years ago.
Collaborators: Jean-Michel Rampnoux (Univ. Bordeaux); Hamid Kellay (Univ. Bordeaux)
Publication: Activity Induced Rigidity of Liquid Droplets. Physical Review Letters, 2022: 129(13), 138001. (Cover)
II. A swarm of simple active particles can perform various tasks

Collaborators: Jean-François Boudet (Univ. Bordeaux); Juho Lintuvuo (CNRS Bordeaux); Antoine Deblais (Univ. Amsterdam); Hamid Kellay (Univ. Bordeaux)
A swarm of simple active particles confined in a flexible scaffold is a promising system to make mobile and deformable superstructures. These soft structures can perform tasks that are difficult to carry out for monolithic robots because they can infiltrate narrow spaces, smaller than their size, and move around obstacles. To achieve such tasks, the origin of the forces the superstructures develop, how they can be guided, and the effects of external environment, especially geometry and the presence of obstacles, need to be understood.
Here, we report measurements of the forces developed by such superstructures, enclosing a number of mindless active rod-like robots, as well as the forces exerted by these structures to achieve a simple function, crossing a constriction.
Publication: From collections of independent, mindless robots to flexible, mobile, and directional superstructures. Science Robotics, 2021: 6(56) p.eabd0272. (Cover)